Boostcamp AI Tech (P3 - Day01)
Peer session
- “UNKNOWN” class에 대한 처리가 중요해보임
- (종호님) zero-shot object detection을 활용하면 도움이 될 수도 있을듯
- https://arxiv.org/abs/1804.04340
- https://paperswithcode.com/task/zero-shot-object-detection
- 협업 어떤 방식으로 할 지
- (현우님) Stage 1의 베이스라인처럼 model, inference, util 등으로 파일을 구분하고 각각 내부에 함수나 클래스를 추가하며 config를 바꿔 실험하는 방향으로 통합하면 좋을듯
- (현우님) Stage 1의 베이스라인처럼 model, inference, util 등으로 파일을 구분하고 각각 내부에 함수나 클래스를 추가하며 config를 바꿔 실험하는 방향으로 통합하면 좋을듯
- (종호님) zero-shot object detection을 활용하면 도움이 될 수도 있을듯
프로젝트 활동
- mIoU score: 0.3061 달성
- Model: FCN8s
- 바꾼 hyperparam
- Resize(256, 256)
- epoch=5
-
FCN-16s 모델 구현하기
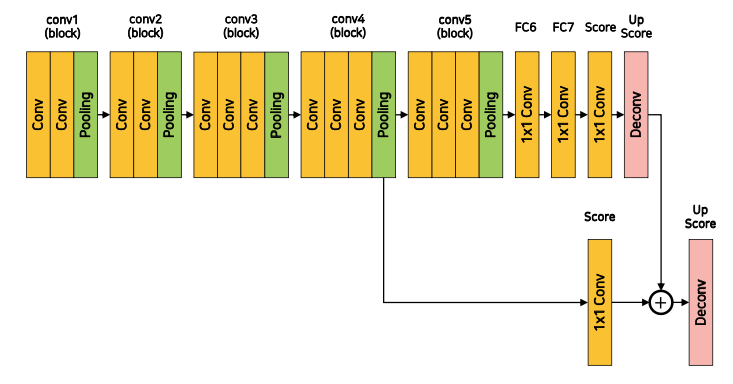
class FCN16s(nn.Module): def __init__(self, num_classes=21): super(FCN16s, self).__init__() self.relu = nn.ReLU(inplace=True) self.conv1_1 = nn.Conv2d(3, 64, 3, padding=1) self.conv1_2 = nn.Conv2d(64, 64, 3, padding=1) self.pool1 = nn.MaxPool2d(2, 2, ceil_mode=True) self.conv2_1 = nn.Conv2d(64, 128, 3, padding=1) self.conv2_2 = nn.Conv2d(128, 128, 3, padding=1) self.pool2 = nn.MaxPool2d(2, 2, ceil_mode=True) self.conv3_1 = nn.Conv2d(128, 256, 3, padding=1) self.conv3_2 = nn.Conv2d(256, 256, 3, padding=1) self.conv3_3 = nn.Conv2d(256, 256, 3, padding=1) self.pool3 = nn.MaxPool2d(2, 2, ceil_mode=True) self.conv4_1 = nn.Conv2d(256, 512, 3, padding=1) self.conv4_2 = nn.Conv2d(512, 512, 3, padding=1) self.conv4_3 = nn.Conv2d(512, 512, 3, padding=1) self.pool4 = nn.MaxPool2d(2, 2, ceil_mode=True) self.conv5_1 = nn.Conv2d(512, 512, 3, padding=1) self.conv5_2 = nn.Conv2d(512, 512, 3, padding=1) self.conv5_3 = nn.Conv2d(512, 512, 3, padding=1) self.pool5 = nn.MaxPool2d(2, 2, ceil_mode=True) self.fc6 = nn.Conv2d(512, 4096, 1) self.drop6 = nn.Dropout2d() self.fc7 = nn.Conv2d(4096, 4096, 1) self.drop7 = nn.Dropout2d() self.score_fr = nn.Conv2d(4096, num_classes, 1) self.skip_score = nn.Conv2d(512, num_classes, 1) self.upscore2 = nn.ConvTranspose2d(num_classes, num_classes, 4, stride=2, padding=1) self.upscore16 = nn.ConvTranspose2d(num_classes, num_classes, 32, stride=16, padding=8) def forward(self, x): x = self.relu(self.conv1_1(x)) x = self.relu(self.conv1_2(x)) x = self.pool1(x) x = self.relu(self.conv2_1(x)) x = self.relu(self.conv2_2(x)) x = self.pool2(x) x = self.relu(self.conv3_1(x)) x = self.relu(self.conv3_2(x)) x = self.relu(self.conv3_3(x)) x = self.pool3(x) x = self.relu(self.conv4_1(x)) x = self.relu(self.conv4_2(x)) x = self.relu(self.conv4_3(x)) x = self.pool4(x) skip = x x = self.relu(self.conv5_1(x)) x = self.relu(self.conv5_2(x)) x = self.relu(self.conv5_3(x)) x = self.pool5(x) x = self.drop6(self.fc6(x)) x = self.drop7(self.fc7(x)) x = self.score_fr(x) x = self.upscore2(x) skip = self.skip_score(skip) x = x + skip x = self.upscore16(x) return x
강의
- COCO Dataset
- Image files
- data.json
- info
- year, version, description, contributor, url, date_created
- licenses
- id, name, url
- images
- width, height, file_name, license, flickr_url, coco_url, data_captured, id
- categories (only train)
- id, name, supercategory
- annotations (only train)
- image_id, category_id, segmentation, area, bbox, iscrowd, id
- info
- Target
- Segmentation
- images: (batch, 3, height, width)
- targets: (batch, height, width)
- Object detection
- images: (batch, 3, height, width)
- targets:
- image_id
- boxes: (x_min, y_min, x_max, y_max)
- labels
- area: box의 면적. IoU를 쉽게 구하기 위함
- iscrowd: object가 너무 많아 하나의 군집으로 labeling 여부
- Segmentation
- Metric
- mAP (mean Average Precision)
- precision = $\frac{TP}{TP + FP}$ = $\frac{TP}{\text{All Detections}}$
- recall = $\frac{TP}{TP + FN}$ = $\frac{TP}{\text{All Ground Truths}}$
- PR curve
- confidence(예측 확신 정도)가 높은 순으로 정렬 후 TP, FP를 누적해가며 precision, recall을 각각 계산
- precision, recall을 세로, 가로로 놓고 좌표평면에 대응하는 선을 그리면 PR curve
- AP (Avergage Precision)
- PR curve 아래 면적
- 모든 클래스에 대해서 AP를 구해서 클래스 개수로 나눠주면 mAP
- mAP = $\frac{1}{n} \sum_{k=1}^{k=n} AP_k$
- (n: class 개수)
- mIoU
- 모든 클래스에 대해서, 각각 Ground truth와 Predict의 픽셀별 교집합/합집합을 구한 뒤 클래스 개수로 나눈 값
- $\frac{\vert X \cap Y \vert}{\vert X \cup Y \vert}$
- mAP (mean Average Precision)
- Segmentation
- 마케팅 분야: “비슷한 성향을 가진 소비자들을 묶는 작업”
- 이미지 분야: 비슷한 픽셀들을 묶는 작업
- 다른 분야와 비교
- Single object
- classification, localization
- Multi object
- detection, segmentation
- Single object
- FCN
- Backbone: VGGNet
- FC layer를 convolution layer로 대체
- 각 픽셀의 위치정보를 보존한 채 특징 추출
- 임의의 입력 사이즈(height, width)에 상관 없이 연산
- transposed convolution(upsampling, deconvolution)을 이용해 pixel wise prediction 수행
- Models
- FCN-32s
- 5 pooling layers $\rightarrow$ x32 upsample
- FCN-16s
- FCN-32s + conv4 layer skip connection
- FCN-8s
- FCN-16s + conv3 layer skip connection
- FCN-32s
- Metric
- Pixel accuracy
- $\frac{\text{True pixel}}{\text{Total pixel}}$
- Mean IoU
- 클래스별 $\frac{\text{Ground Truth } \cap \text{ Predict}}{\text{Ground Truth } \cup \text{ Predict}}$ 평균
- 클래스별 $\frac{\text{Ground Truth } \cap \text{ Predict}}{\text{Ground Truth } \cup \text{ Predict}}$ 평균
- Pixel accuracy